

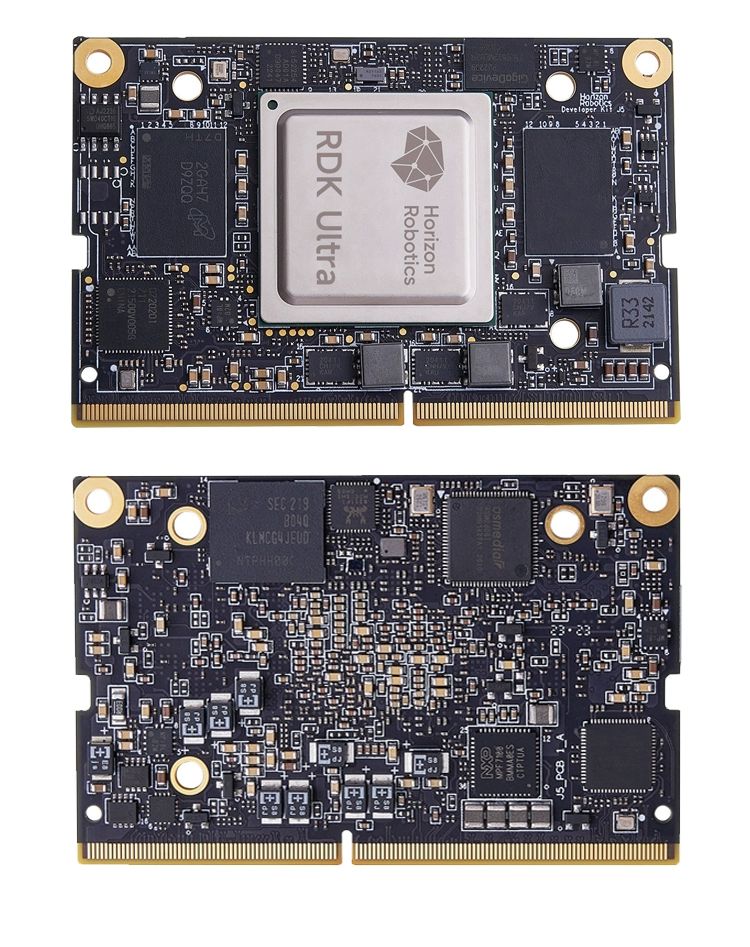
Маҷмӯаи рушди роботҳои Horizon RDK Ultra дар дохили камераи MIPI/USB3.0/PCIe2
Нигоҳдории ройгонро ташвиш диҳед
Модули аслӣ бо нигаҳдории 64G eMMC меояд ва ду бандарҳои PCle барои дастрасии осон ба дигар нигаҳдории NVMe ҷудо карда шудаанд.
Муоширати бемамониат
Илова ба порти шабакаи хушки мегабитӣ, маҷмӯа инчунин модули корти бесими дугонаи қаблан насб карда шудааст, ки Bluetooth 5.0, Wi-Fi-и дугонаро дастгирӣ мекунад ва ҳангоми илова кардани мавҷгири PCB, пайвасти баландсуръат, боэътимоди шабакаи бесим ва функсияи алоқаи Bluetooth-ро барои маҷмӯа таъмин мекунад.
Интерфейси бой
Чор бандарҳои MIPICamera, чор бандарҳои USB3.0 ва ду бандарҳои PCle2.0.
Маҷмӯи пурра
Лавозимотҳои асосӣ, аз қабили таъминоти барқ, манзил, вентиляторҳои хунуккунӣ модули Wi-Fi ва камера стандартӣ мебошанд.
Аризаи баркамол
Системаи оператсионии робот Horizon TogetherROSTM.Bot дастгирӣ bev. Ҷойгиркунии босуръати алгоритмҳои роботҳо ва барномаҳо, ба монанди дарки дурбинии радар.
| Параметри маҳсулот | |
| Қувваи ҳисоббарории AI | 96ТОП |
| ВПМ - Воҳиди Пардозиши Марказӣ | 8×A551.2G |
| Хотираи дохилӣ | 8 ГБ LPDDR4 |
| Мағоза | 64 ГБ eMMC |
| Мултимедиа | H.265/HEVC Codec 4K@60fps. JPEG рамзгузорӣ ва рамзкушоӣ 16 Мпиксел Назорати битрейти CBR, VBR, AVBR, FixQp ва QpMap |
| Интерфейси сенсор | 2 × 4-хати MIPI CSI 2 × 2-хати MIPI CSI |
| USB | 4×USB3.0 |
| Порти силсилавии ислоҳи хатогиҳо | 1x Micro USB2.0, UART USB |
| Интерфейси намоиш | 1×HDMI1.4, дастгирии 1080p@60 |
| Интерфейси шабакаи бесим | Модули дугонаи Wi-Fi/Bluetooth (ихтиёрӣ): Wi-Fi 2,4 ГГц/5 ГГц、Bluetooth 4.2 |
| Интерфейси шабакаи симӣ | Интерфейси 1 × RJ45 |
| Дигар IO | 40PIN (UART、SPI、I2S、I2C、PWM、GPIO) 6 x назорати пои имкон медиҳад 1 x интерфейси мухлиси PWM |
| Вуруди нерӯ | 5~20В 10~25Вт |
| Дастгирии система | Ubuntu 20.04 |



Категорияҳои маҳсулот






-

Телефон
-

Почтаи электронӣ
-

Whatsapp
-

Skype
-

Skype
-

Skype